机器视觉系统在机器人行业的应用
以机器视觉为导向的机器人定位、识别、检测技术已经是全自动化领域一种新的标志。在过去的生产中,生产线上有大量的工人在用手摆放着零件的位置和方向,以便进入下一个工序,或者使用人工手工将不同的产品进行无缝贴合。但是工人们长期进行这样的枯燥、机械式生产很容易产生疲劳,以至于出来的产品质量参差不齐,很难达到客户的要求。为此厂家提出了要采用机器人技术来完成这些工作。
本文主要介绍上海波创电气有限公司将DALSA机器视觉系统应用于机器人行业的一些成功案例,简单介绍机器视觉在机器人行业的应用。
与机械手配合的应用:“拣选”检测应用、机械手对位检测应用等
应用案例1
机器人定位抓取:
案例说明:
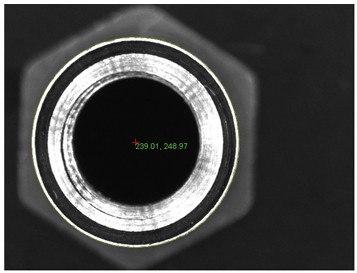
在自动化的生产线上,有很多情况下,产品是无规则的排列,为了提高生产效率就要求机器人准确迅速的找到产品的位置,从而进行准确的抓取,进行下一步工位的操作。如图所示为一个机械加工的零部件,从传送带上自动的输送到机械手的抓取范围内。通过机器视觉自动捕捉到零部件的中心点,发送给机器人的控制系统,由于该产品是一个中心对称的产品,因此只需要定位该产品的中心位置即可。
应用案例2:
机械手对位
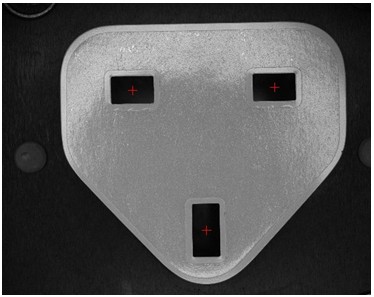
在一些生产过程中,厂家需要把两个产品准确的装配在一起,利用机械手可以达到很高的装配效率,如下图所示A产品要准确无误的装配到B产品上。
A相机图像
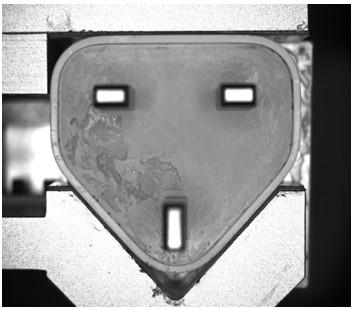
B相机图像
项目描述:
A相机将产品的中心点(3个)分别计算出来
B相机将产品的中心点(3个)分别计算出来
Zui终输出给机械手一个X ,Y和角度偏移量,来引导机械手抓取A相机拍摄的产品贴合到B相机拍摄的产品。
应用案例3
机器人码垛
在许多自动化的生产线上,Zui后一道工序就是把产品堆放整齐,然后打包成型。而许多行业的产品体积大,重量也比较大,如果采用人工进行堆垛的话,不仅耗费大量的人力,而且生产效率得不到提升。在这种情形下,重载机器人就成为解决企业码垛问题的首选,而机器视觉作为机器人的眼睛,直接关系到机器人能否正确的抓取产品。
案例说明:
某知名玻璃生产企业,由于单块玻璃板的重量很重,采用人工堆垛的方式,工人的劳动强度很大,而且效率比较低,采用机器人自动抓取,就节省了人工堆垛这个工序的人力,生产效率得到大幅提升,而且机器视觉在给机器人导航的同时,也可以检测玻璃的缺陷

A 现场图片
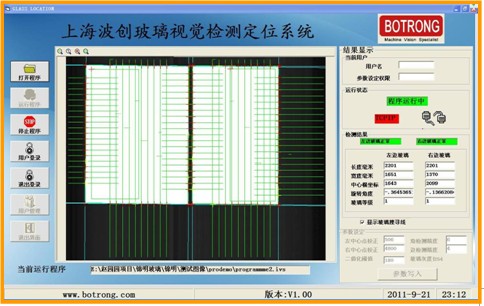
B检测界面
注意问题:
在机器人行业的应用中,如何正确安装相机位置是一个很关键的问题。如果是安装在机械手上是移动摄像头,会有被碰撞的风险,如触碰到零件箱或其它零件。Zui好方法是采用固定安装的摄像机方案。在一个零件被拣取后,摄像头将移到下一个被抓取的零件上,同时机械手抓放另一个零件。
针对机器人行业的不同定位、识别、检测等要求,上海波创电气有限公司有不同的视觉系统去解决不同的问题,所采用的美国TELEDYNE DALSA IPD产品系列如下:
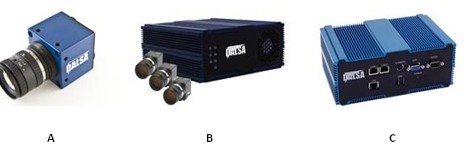
A .小巧的多处理器智能相机BOA系列
BOA是一款性能高度集中的智能相机系统,可以提供不同级别的视觉解决方案。特点:内置多处理引擎,安装实施迅速。功能强大,IP67防护,坚固可靠。内嵌DALSA直观教导式检测软件,无需另外安装软件。
B .支持多相机的VA系统系列
VA系列视觉系统包含多种型号,用户可以根据需要选择支持不同相机数量的系统,内嵌两种针对不同客户需求的软件:iNspect和Sherlock。特点:可以支持两个以上的多种品牌相机,内含存储空间,方便图片及程序的存储,灵活的应用软件,工业PC级的应用平台。
C .千兆网相机视觉系统GEVA
GEVA是一款优秀的视觉系统控制器,是DALSA视觉系统中处理Zui快的一款机器,您可以充分感受到它的超快的运算能力。特点:具有双核处理器及千兆网接口,适用于高速的应用场合。具有强大的系统整合能力。并支持多相机异步功能。