双目视觉技术解析
2016-07-20技术资料
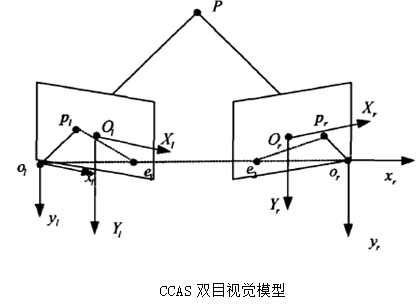
双目视觉的基础原理是基于三角测量原理,我们并排放置两个相机,利用投影光学系统可使两个相机视野在所需求的物距发生重叠,通过每个相机拍摄的图片,我们可以捕捉到不同视角的场景,如下图所示:
在实现3D测量前,首先我们需要确定左边相机图像的表面点在右边相机图像的哪里显示;其次必须知道左右相机图像的关联像素交叉点。这涉及到2种技术:立体匹配和双目标定。
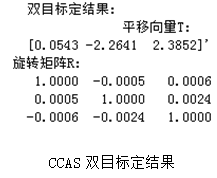
1、双目标定
双目标定是对双目三维测量系统的参数初始化过程,也就是说用已知世界坐标系测算双目系统的参数,可以用下面的关系进行描述:
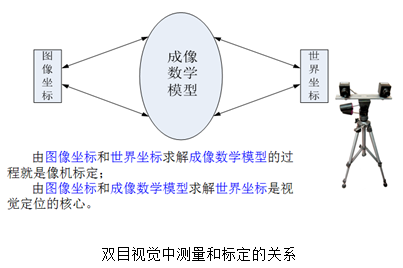
2、相机矫正
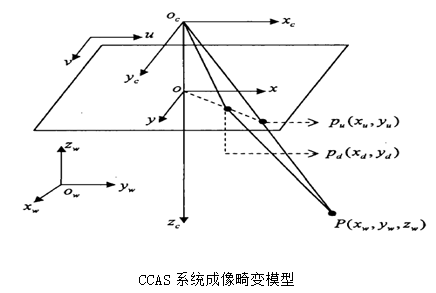
通过上述关系,很容易发现“图像坐标”是每次计算的基础,为了准确的计算该坐标,我们需要相机是“理想模型”,而实际上任何成像系统都有其畸变。相机的畸变模型如下,我们可以通过单相机标定确定相机的畸变系数。
1、双目标定
双目标定是对双目三维测量系统的参数初始化过程,也就是说用已知世界坐标系测算双目系统的参数,可以用下面的关系进行描述:
3、立体匹配
由于单相机获取的图像只能计算出二维坐标,因为我们使用了2套相机,且2套相机之间的关系也是已知的,那么如果我们能把三维空间中某点在左右相机成像的二维坐标都计算出来,且能知道这是同一个点,这样就可以计算出三维坐标。这里面确认同名点的技术就是立体匹配。立体匹配有很多种算法,其中局部匹配法是Zui常用的,但是就目前已有算法来说,没有一种算法可以实现100%匹配。一般来说待匹配点越多,匹配准确率越低。
4、三维测量
不管使用哪种匹配方式,Zui终的目的还是把兴趣点的三维坐标计算出来,达到我们三维信息获取的目的。目前比较常见的应用有三类:三维还原、立体导航、空间跟踪。